Moini, A.; Bouzerdoum, A.; Eshraghian, K.; Yakovleff, A.; and others.
An insect vision-based motion detection chip.
IEEE Journal of Solid-State Circuits, Feb. 1997, vol.32, (no.2):279-84.
This is on-line through the Melvyl Image server:
Yakovleff, A.; Moini, A.; Bouzerdoum, A.; Nguyen, X.T.; and others.
A micro-sensor based on insect vision.
Proceedings. 1993 Computer Architectures for Machine Perception.
New Orleans, LA, USA, 15-17 Dec. 1993). Edited by: Bayoumi,
M.A.; Davis, L.S.; Valavanis, K.P. Los Alamitos, CA, USA: IEEE Comput. Soc.
Press, 1993. p. 137-46.
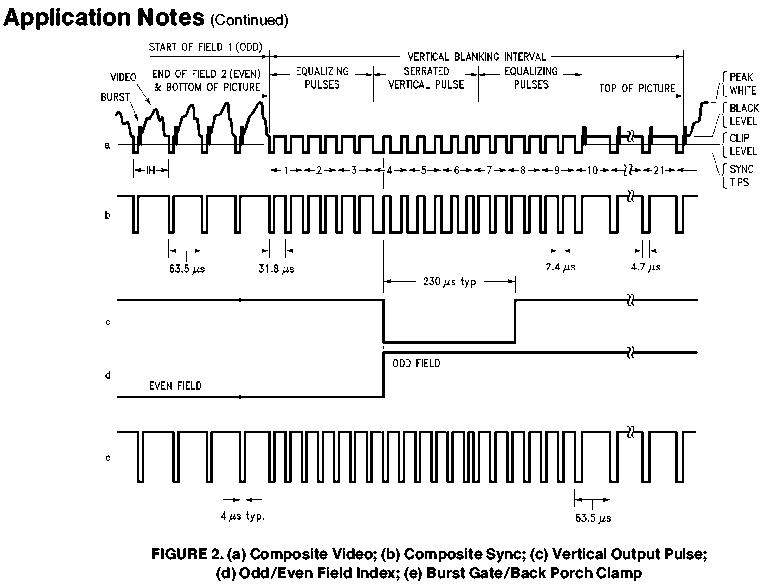
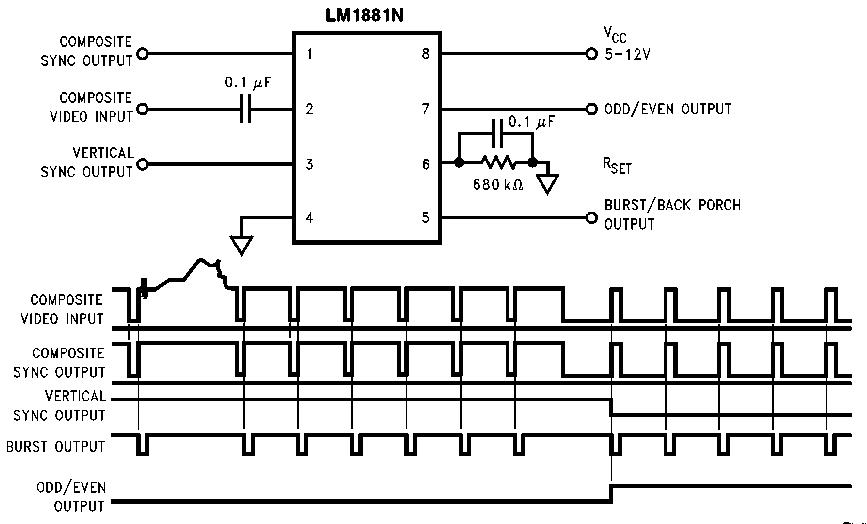
The following 2 figures show the details of timing near the
Vertical Synchronization interval. (From the National LM1881 Data Sheet).
Connection diagram and basic timing signals:
Detailed timing during vertical retrace interval.
Note that vertical blanking is 21 horizontal lines.
Also note that the first 9 lines have ``equalizing pulses''
every 31.8 microseconds. Hence, you will have more about 23 edges
to count after the vertical sync output goes low before the
top line begins.